





Product Information
E5-CAT-HS68D is ECON Technology's new EtherCAT hybrid servo driver,using the latest floating-point 64-bit MCU digital processing technology,the drive control algorithm using advanced variable current technology and advanced frequency conversion technology,the driver low heat,small motor vibration,running smooth.The user can set any ID address within 1-255 and any current value within rated current, motor matching and so on,to meet most occasions application.The EtherCat hybrid servo drive can drive hybrid servo motor from Nema23 to Nema34.
Product Features
●New floating point 64bit MCU technology
●Drive kinds of motor:hybrid servo motor,from Nema23 to Nema34
● Support Beckoff/Delta/Omron PLC
Product Basic Technicial Indexes
Model | Series | Type | Control type | Supported Protocols | Operation model | Phase | Supply Voltage | Output Current(A) | Digial of Inputs | Digial of Outputs | Analog input | Matched motor |
E5-CAT HS68D | E5-CAT | Hybrid servo(closed loop setpper) | Ethercat | CoE,CiA402 | PP.PV,HM,CSP | 2 | 2-50VDC | 8 | 5 | 3 | / | Nema17,23,24,34 hybrid servo(closed loop stepper motor) |
Connectors And Pin Assignment
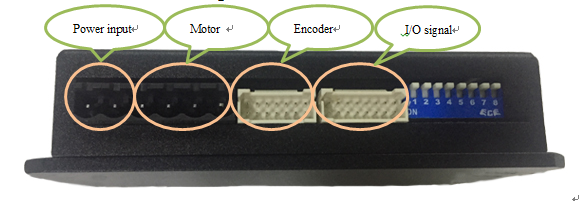
The E5-CAT-HS68D has four connectors, connector for i/o connections, connector for Encoder Feedback and hall signal, connector for power and motor connection, and the CAT Communication Port.
Product Interface Description And Wiring
1)Control signals connector
Pin Function | Details |
pl+ | Pulse signal: In Pulse+direction mode, this input represents pulse signal,active at each rising or falling edge, In CW/CCW mode, this input represents clockwise (CW) pulse, active both at each high level and low level. 4-28V for PUL-HIGH, 0-0.5V for PUL-LOW. For reliable response,pulse width should be longer than 1.5μs |
pl- | |
dr+ | Dir signal: In Pulse+direction mode, this signal has low/high voltage levels representing two directions of motor rotation; in CW/CCW mode (software configurable), this signal is counter-clock (CCW) pulse,active both at high level and low level (software configurable). For reliable motion response, DIR signal should be ahead of PUL signal by 2.5μs at least. 4-28V when DIR-HIGH,0-0.5V when DIR-LOW. Please note that rotation direction is also related to motor-Drive wiring match. Exchanging the connection of two wires for a coil to the Drive will reverse motion direction. For reliable response,pulse width should be longer than 1.5μs |
dr- | |
in+ | Low speed signal:in1,in2,in3 common postive input,5-28VDC |
in1 | Low speed in1 negative input |
in2 | Low speed in2 negative input |
in3 | Low speed in3 negative input |
ot- | Common negative OC emitter output,ot1,ot2,ot3 emitter OC output common terminal |
ot1 | ot1 emitter output,the Max pull-up voltage 24Vdc,the pull-up resistance 2KΩ,the Max output current 100mA |
ot2 | ot2 emitter output,the Max pull-up voltage 24Vdc,the pull-up resistance 2KΩ,the Max output current 100mA |
ot3 | ot3 emitter output,the Max pull-up voltage 24Vdc,the pull-up resistance 2KΩ,the Max output current 100mA |
gnd | 5V- |
RS232-TX | RS232 sending,TTL-3.3V electric,use to set or deploy parameter |
RS232-RX | RS232 receiving,TTL-3.3V electric,use to set or deploy parameter |
5V | 5V+,current 50mA |
2) Encoder Feedback and hall signal Connector
Pin Function | Details |
ea+ | Encoder channel A input |
ea- | |
eb+ | Encoder channel B input |
eb- | |
ez+ | Encoder channel Z input(if there is Z signal in encoder ,no connection needed ) |
ez- | |
eu+ | Hall U channel U input, special for dc brushless servo, open loop/hybrid servo no connection needed |
eu- | |
ev+ | Hall V channel U input, special for dc brushless servo, open loop/hybrid servo no connection needed |
ev- | |
ew+ | Hall W channel U input, special for dc brushless servo, open loop/hybrid servo no connection needed |
ew- | |
5V | Provide 5V+ dc power to motor encoder and Hall components, current 100mA |
gnd | 5V- |
3)Power and Motor
Pin | Definition | I/O | Description |
1 | A+ | O | Motor Phase A+ |
2 | A-/U | O | Motor Phase A- (U for dc brushless servo motor) |
3 | B+ /V | O | Motor Phase B+ (V for dc brushless servo motor) |
4 | B- /W | O | Motor Phase B- (W for dc brushless servo motor) |
5 | +VDC | I | 15-50VDC,36VDC is recommended, leaving rooms for voltage fluctuation and back-EMF. |
6 | GND | GND |
4)EtherCAT Communication Port

Two RJ45 terminals
PIN | Signal | Function Description | |
1 | TX+ | Ether CAT data sending positive port | EtherCAT IN(ECAT IN) |
2 | TX- | Ether CAT data sending negative port | |
3 | RX+ | Ether CAT data receiving positive port | |
4 | NC | No connected | |
5 | NC | No connected | |
6 | RX- | Ether CAT data receiving negative port | |
7 | NC | Disconnect | |
8 | NC | Disconnect | |
9 | TX+ | Ether CAT data sending positive | EtherCAT OUT(ECAT OUT) |
10 | TX- | Ether CAT data sending negative | |
11 | RX+ | Ether CAT data receiving positive | |
12 | NC | No connected | |
13 | NC | No connected | |
14 | RX- | Ether CAT data receiving negative | |
15 | NC | No connected | |
16 | NC | No connected |
Note: The cable connecting E5-CAT-HS68D to PC must be a dedicated cable. Please check before use to avoid damage.
Reference Manual
EtherCAT hybrid servo drive user manual ET-CAT-HS86D
Recommendations
Nema23 hybrid servo motor with 2.9Nm
Nema34 easy servo motor 8.5Nm with brake
Nema34 step servo motor with 12Nm torque
Nema24 closed loop stepper motor with 4Nm torque
Hot Tags: ethercat hybrid servo driver, manufacturer, supplier, factory





